Mobile Robot Olfaction and Olfactory Display

Research members: Dr. Hiroshi Ishida, Dr. Haruka Matsukura
Research fields: Mechanical engineering, Electrical and electronic engineering, Principles of Informatics (1)
Departments: Institute of Engineering
Keywords: chemical sensor, robot, chemical source localization, virtual reality, olfactory display
Web site:
Summary
Our research efforts are focused on the development of robotic olfactory sensing systems and olfactory display systems.
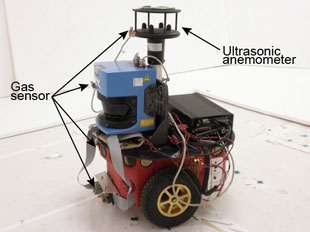
- Gas-source localization robot (1), (2)
Gas-source localization robots are equipped with an ultrasonic anemometer and gas sensors, and track gas plumes to find their sources. The potential applications of the robots include autonomous searches for gas leaks and explosives.
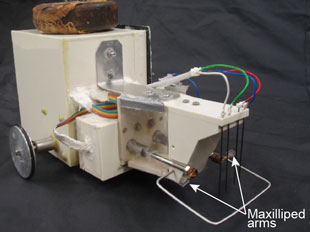
- Crayfish robot for underwater chemical source localization (3), (4)
Crayfish generate water currents using their "maxillipeds" to collect the smell of food and find its location. A crayfish robot equipped with small arms that mimic crayfish maxillipeds has been developed, and the effectiveness of active smell collection has been proved.
- Olfactory assist mask (5)
An olfaction aid system has been developed, which allows a human to have an enhanced sense of smell. This system measures the concentration variations of a gaseous chemical compound by using a gas sensor, and presents an odor with amplified concentration variations to the user.
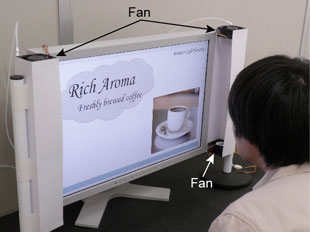
- Olfactory display (6)
An olfactory display system that can generate an odor distribution on a two-dimensional display screen has been developed. This distribution leads the user to perceive the odor as emanating from the screen.
Reference articles and patents
1) "Controlling a gas/odor plume-tracking robot based on transient responses of gas sensors," H. Ishida, G. Nakayama, T. Nakamoto, and T. Moriizumi, IEEE Sens. J., 5 (2005) 537-545.
2) "Mobile robot navigation using vision and olfaction to search for a gas/odor source," H. Ishida, H. Tanaka, H. Taniguchi, and T. Moriizumi, Auton. Robot., 20 (2006) 231-238.
3) ”Crayfish robot that generates flow field to enhance chemical reception," M. Ohashi, Y. Kagawa, T. Nakatsuka, and H. Ishida, J. Sens. Tech., 2 (2012) 185-195.
4) "Adaptive chemical sampling device inspired by crayfish," R. Takemura, K. Takahashi, T. Makishita, and H. Ishida, ECS Trans., 50(12) (2012) 259-266.
5) "嗅覚アシストマスクの開発", 松倉悠, 近江淳平, 石田寛, 電気学会論文誌E, 133 (2013) 212-218.
6) "Smelling screen: Development and evaluation of an olfactory display system for presenting a virtual odor source," H. Matsukura, T. Yoneda, and H. Ishida, IEEE Trans. Visual. Comput. Graphics, 19 (2013) 606-615.
Contact
University Research Administration Center(URAC),
Tokyo University of Agriculture andTechnology
urac[at]ml.tuat.ac.jp
(Please replace [at] with @.)