嗅覚ロボットと嗅覚ディスプレイ

メンバー: 石田寛、松倉悠
分野: 機械工学、電気電子工学、情報学基礎
所属: 工学研究院
キーワード: ケミカルセンサ、 ロボット、 化学物質源探知、 バーチャルリアリティ、 嗅覚ディスプレイ、 chemical sensor、 robot、 chemical source localization、 virtual reality、 olfactory display
ウェブサイト:
研究概要
匂いセンシングロボットと匂い提示システムに関して、以下の研究開発を行っています。
・ガス源探知ロボット(1), (2)
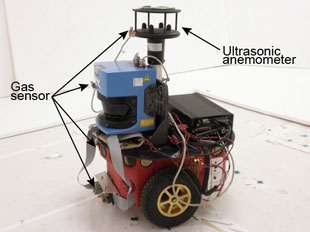
超音波風速計及びガスセンサを用いて、与えられた環境内の気流場とガス濃度分布を計測し、自律的にガス源探知を行うロボットを開発しています。爆発物やガス漏れ箇所の探索などの応用が期待されます。
・水中化学物質源探知ロボット(ザリガニ型ロボット)(3), (4)
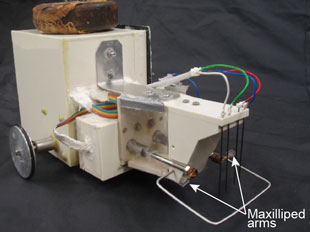
ザリガニは「顎脚」と呼ばれる器官で水流を生成して触角に匂いを集め、えさを探します。これを模倣して顎脚アームを搭載したロボットを開発し、顎脚の有効性を示しました。ザリガニの行動を解明し、将来的には水中の化学物質源探知への応用を目指します。
・嗅覚アシストマスク(5)
周囲に漂っている希薄なガスをガスセンサで検出し、その濃度変化を別の匂いの濃度変化に置き換えて人間に提示する装置を開発しました。人間の嗅覚感度を擬似的に高めることができます。
・嗅覚ディスプレイ(6)
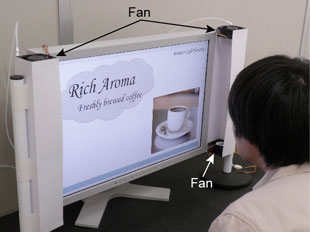
ファンで作り出す気流を上手く制御して、テレビ画面から匂いが出ているかのように感じさせる装置を開発しました。香り付き電子広告などの応用が期待されます。
主要論文・参考事項
1) "Controlling a gas/odor plume-tracking robot based on transient responses of gas sensors," H. Ishida, G. Nakayama, T. Nakamoto, and T. Moriizumi, IEEE Sens. J., 5 (2005) 537-545.
2) "Mobile robot navigation using vision and olfaction to search for a gas/odor source," H. Ishida, H. Tanaka, H. Taniguchi, and T. Moriizumi, Auton. Robot., 20 (2006) 231-238.
3) ”Crayfish robot that generates flow field to enhance chemical reception," M. Ohashi, Y. Kagawa, T. Nakatsuka, and H. Ishida, J. Sens. Tech., 2 (2012) 185-195.
4) "Adaptive chemical sampling device inspired by crayfish," R. Takemura, K. Takahashi, T. Makishita, and H. Ishida, ECS Trans., 50(12) (2012) 259-266.
5) "嗅覚アシストマスクの開発", 松倉悠, 近江淳平, 石田寛, 電気学会論文誌E, 133 (2013) 212-218.
6) "Smelling screen: Development and evaluation of an olfactory display system for presenting a virtual odor source," H. Matsukura, T. Yoneda, and H. Ishida, IEEE Trans. Visual. Comput. Graphics, 19 (2013) 606-615.
お問い合わせ先
東京農工大学・先端産学連携研究推進センター
urac[at]ml.tuat.ac.jp([at]を@に変換してください)
Mobile Robot Olfaction and Olfactory Display
Research members: Dr. Hiroshi Ishida, Dr. Haruka Matsukura
Research fields: Mechanical engineering, Electrical and electronic engineering, Principles of Informatics (1)
Departments: Institute of Engineering
Keywords: chemical sensor, robot, chemical source localization, virtual reality, olfactory display
Web site:
Summary
Our research efforts are focused on the development of robotic olfactory sensing systems and olfactory display systems.
- Gas-source localization robot (1), (2)
Gas-source localization robots are equipped with an ultrasonic anemometer and gas sensors, and track gas plumes to find their sources. The potential applications of the robots include autonomous searches for gas leaks and explosives.
- Crayfish robot for underwater chemical source localization (3), (4)
Crayfish generate water currents using their "maxillipeds" to collect the smell of food and find its location. A crayfish robot equipped with small arms that mimic crayfish maxillipeds has been developed, and the effectiveness of active smell collection has been proved.
- Olfactory assist mask (5)
An olfaction aid system has been developed, which allows a human to have an enhanced sense of smell. This system measures the concentration variations of a gaseous chemical compound by using a gas sensor, and presents an odor with amplified concentration variations to the user.
- Olfactory display (6)
An olfactory display system that can generate an odor distribution on a two-dimensional display screen has been developed. This distribution leads the user to perceive the odor as emanating from the screen.
Reference articles and patents
1) "Controlling a gas/odor plume-tracking robot based on transient responses of gas sensors," H. Ishida, G. Nakayama, T. Nakamoto, and T. Moriizumi, IEEE Sens. J., 5 (2005) 537-545.
2) "Mobile robot navigation using vision and olfaction to search for a gas/odor source," H. Ishida, H. Tanaka, H. Taniguchi, and T. Moriizumi, Auton. Robot., 20 (2006) 231-238.
3) ”Crayfish robot that generates flow field to enhance chemical reception," M. Ohashi, Y. Kagawa, T. Nakatsuka, and H. Ishida, J. Sens. Tech., 2 (2012) 185-195.
4) "Adaptive chemical sampling device inspired by crayfish," R. Takemura, K. Takahashi, T. Makishita, and H. Ishida, ECS Trans., 50(12) (2012) 259-266.
5) "嗅覚アシストマスクの開発", 松倉悠, 近江淳平, 石田寛, 電気学会論文誌E, 133 (2013) 212-218.
6) "Smelling screen: Development and evaluation of an olfactory display system for presenting a virtual odor source," H. Matsukura, T. Yoneda, and H. Ishida, IEEE Trans. Visual. Comput. Graphics, 19 (2013) 606-615.
Contact
University Research Administration Center(URAC),
Tokyo University of Agriculture andTechnology
urac[at]ml.tuat.ac.jp
(Please replace [at] with @.)