ロボットの弾性・慣性・重力のエネルギを特定部位に集中させる制御法
メンバー: 水内郁夫、本堂貴敏
分野: 人間情報学、機械工学、健康・スポーツ科学
所属: 工学研究院
キーワード: ロボット、時間反転積分、手先速度最大化、動力学
ウェブサイト:
研究概要

複数リンクが直列に接続されたロボットのダイナミクスは複雑です。各リンクの運動エネルギとポテンシャルエネルギの総和が保存されている状態で、ある時は先端リンクの速さが非常に速くなり(他の部位は遅く重力の位置エネルギも低い)、また別な時には重力の位置エネルギが大部分であるような(腕が上がって速度は非常に遅い)状態になったりします。
総エネルギ量はアクチュエータが系に投入したエネルギ量で決まりますが、総エネルギ量が同じであっても、手先の速度が非常に高速な状態に至ることができる軌道を求める方法は従来明らかにされていませんでした。人間の場合にも野球の投球やテニスのサービスなどで、最も速い手先速度を実現することは非常に難しく、上投げの投手であってもより速い速度に至れる横投げのフォームを見つけ出せる可能性は残っています。
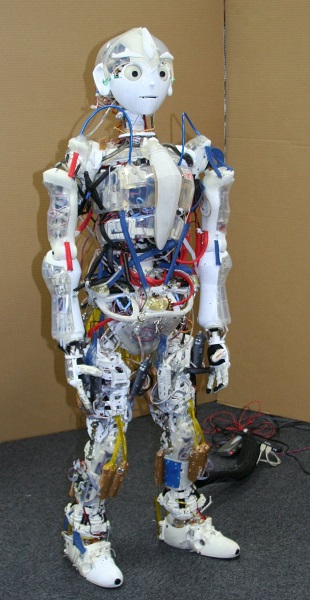
私たちのグループでは、身体に物理的な弾性要素を組み込んだロボットを用いて、アクチュエータの出力性能が決められた場合に、手先速度が非常に高速になる瞬間を創り出すような制御法を、提案しました。
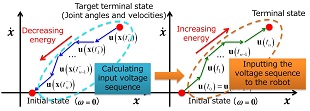
運動方程式を時間が戻る方向に解く(しかも常にアクチュエータの瞬間投入エネルギが最大になるように電圧を決める)という方法です。
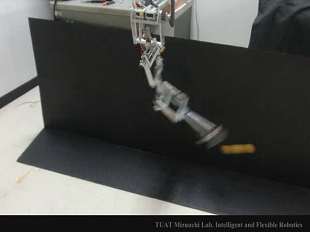
投擲、跳躍、打撃等の、瞬発的な動作への応用はもちろんのこと、通常のタスク遂行においても、従来そのアクチュエータで実現できていた性能を大きく上回る性能を、同じアクチュエータで実現できるようになります。
主要論文・参考事項
[1] Takatoshi Hondo, Ikuo Mizuuchi. End-tip Speed Maximization for Noncyclic Swing Motion Based on Time Reversal Integral in Multiple-joint Robots, in Proceedings of 2015 IEEE International Conference on Robotics and Automation (ICRA), pp.756--761, Seattle, USA, May 27, 2015.
[2] 本堂 貴敏, 水内 郁夫. 時間反転積分法と終端状態最適化に基づく多関節投擲運動における制御入力計画法, 第31回日本ロボット学会学術講演会講演論文集, RSJ2013AC2I1-03, 2013.
[3] 本堂 貴敏, 水内 郁夫. 直列弾性関節ロボットにおける重力を考慮した時間反転積分法を用いた3次元投擲運動計画, 第32回日本ロボット学会学術講演会講演論文集, RSJ2014AC1Q3-08, 2014.
[4] 本堂 貴敏, 水内 郁夫. 弾性・リンク運動エネルギ増加条件の導入による時間反転積分法の直列弾性関節ロボットへの拡張法, 日本機械学会ロボティクス・メカトロニクス講演会2014講演論文集, 3P2-I04, 2014.
[5] 朝岡 忠, 水内 郁夫. 先端リンクの瞬間的な高エネルギ状態創出のための自由振動理論に基づく運動パターン生成, 日本機械学会ロボティクス・メカトロニクス講演会2015講演論文集, 2P1-F08, 2015.
[6] 朝岡 忠, 水内 郁夫. ロボットリンク間干渉力の巧みな活用による対象部位の瞬間的な高エネルギ状態創出の力学的原理の解明 -平面3リンクロボットでの解明-, 第20回ロボティクスシンポジア予稿集, pp.571--578, 2015.
[7] 朝岡 忠, 水内 郁夫. ロボットリンク間干渉力の活用による対象部位の瞬間的な高エネルギ状態遷移の実機実験, 第32回日本ロボット学会学術講演会講演論文集, RSJ2014AC1B3-07, 2014.
[8] 朝岡 忠, 水内 郁夫. 運動指令とロボットリンク間におけるエネルギ伝達との関係の状態行動価値関数に基づく解析, 日本機械学会ロボティクス・メカトロニクス講演会2014講演論文集, 1P2-Q05, 2014.
[9] 朝岡 忠, 水内 郁夫. 運動連鎖の活用による効率の良いエネルギ伝達を目的とした ロボット運動パターン生成, 第19回ロボティクスシンポジア予稿集, pp.497--503, 2014.
[10] 本堂 貴敏, 水内 郁夫. 1自由度モータ-ばね直列連成系の解析と速度拡大効果に着目した最適設計理論, 日本ロボット学会誌, Vol.29, No.8, pp.675--682, 2011. (DOI: 10.7210/jrsj.29.675)
[11] 本堂 貴敏, 水内 郁夫. モータ-ばね直列連成系の解析と瞬発力利用動作の実現, 日本機械学会ロボティクス・メカトロニクス講演会'10講演論文集, 2A2-C15, 2010.
[12] 本堂 貴敏, 水内 郁夫. 2自由度モータ - ばね直列連成系の解析と瞬発力利用動作の実現, 第28回日本ロボット学会学術講演会講演論文集, RSJ2010AC1P2-7, 2010.
[13] 本堂 貴敏, 水内 郁夫. 可動範囲制約を直接考慮した1自由度モータ - ばね直列連成系の最適パラメータ決定手法, 第28回日本ロボット学会学術講演会講演論文集, RSJ2010AC1P2-6, 2010.
[14] Takatoshi Hondo and Ikuo Mizuuchi. Kinetic Energy Maximization on Elastic Joint Robots Based on Feedback Excitation Control and Excitation Limit Hypersurface, Journal of Robotics and Mechatronics, Vol.25, No.2, pp.347--354, 2013.
[15] Takatoshi Hondo, Ikuo Mizuuchi. Design and Modal Analysis of Feedback Excitation Control System for Vertical Series Elastic Manipulator, in Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.2888--2893, Tokyo, 2013. (DOI: 10.1109/IROS.2013.6696765)
[16] 本堂 貴敏, 水内 郁夫. 重力・弾性ポテンシャルエネルギを考慮したフィードバック励振制御系の解析, 日本機械学会ロボティクス・メカトロニクス講演会2013講演論文集, 2P1-O07, 2013.
[17] 本堂 貴敏, 水内 郁夫. フィードバック励振制御と等エネルギ面解析に基づく弾性関節を活用した高運動エネルギ実現法, 日本機械学会ロボティクス・メカトロニクス講演会'12講演論文集, 2A1-G10, 2012.
お問い合わせ先
東京農工大学・先端産学連携研究推進センター
urac[at]ml.tuat.ac.jp([at]を@に変換してください)
Control Method of Concentrating Robot's Elastic, Inertial, and Gravitational Energy to a Specific Part
Research members: Dr. Ikuo Mizuuchi, Dr. Takatoshi Hondo
Research fields: Human informatics, Mechanical engineering, Health/Sports science
Departments: Institute of Engineering
Keywords: robot, time-reversal integral, maximization of end-tip speed, dynamics
Web site:
Summary
Dynamics of serially articulated multiple-joint robot is complexed. While total mechanical energy of each link's kinetic energy and potential energy is preserved, at a moment the end-tip speed gets very high (other parts are very slow and height is low), and at another moment the robot state becomes a state where large part of total mechanical energy is gravitational potential energy (height is high and speed is slow).
The total mechanical energy depends on how much energy the actuators have input energy to the system. How to achieve very high speed of the (only) end-tip has not been solved (even unrecognized), in case of the total mechanical energy is a certain value. In also humans' cases, it is quite difficult to maximize the end-tip speed in throwing a ball or serving in tennis. An overhand pitcher may be able to discover a better side-throw style that can achieve faster speed.
Our group has proposed a control method that can create an instance in which the end-tip speed is very high in a robot with physical elasticity, when performances of actuators are given.
The points of our proposal is solving the equation of motion towards time reversal direction, and deciding the voltages to the motors so as to maximize the input energy at every moment.
Assumed applications include throwing, jumping, hitting, and so on. Moreover in normal tasks, our methods achieve very higher performance than before.
Reference articles and patents
[1] Takatoshi Hondo, Ikuo Mizuuchi. End-tip Speed Maximization for Noncyclic Swing Motion Based on Time Reversal Integral in Multiple-joint Robots, in Proceedings of 2015 IEEE International Conference on Robotics and Automation (ICRA), pp.756--761, Seattle, USA, May 27, 2015.
[2] 本堂 貴敏, 水内 郁夫. 時間反転積分法と終端状態最適化に基づく多関節投擲運動における制御入力計画法, 第31回日本ロボット学会学術講演会講演論文集, RSJ2013AC2I1-03, 2013.
[3] 本堂 貴敏, 水内 郁夫. 直列弾性関節ロボットにおける重力を考慮した時間反転積分法を用いた3次元投擲運動計画, 第32回日本ロボット学会学術講演会講演論文集, RSJ2014AC1Q3-08, 2014.
[4] 本堂 貴敏, 水内 郁夫. 弾性・リンク運動エネルギ増加条件の導入による時間反転積分法の直列弾性関節ロボットへの拡張法, 日本機械学会ロボティクス・メカトロニクス講演会2014講演論文集, 3P2-I04, 2014.
[5] 朝岡 忠, 水内 郁夫. 先端リンクの瞬間的な高エネルギ状態創出のための自由振動理論に基づく運動パターン生成, 日本機械学会ロボティクス・メカトロニクス講演会2015講演論文集, 2P1-F08, 2015.
[6] 朝岡 忠, 水内 郁夫. ロボットリンク間干渉力の巧みな活用による対象部位の瞬間的な高エネルギ状態創出の力学的原理の解明 -平面3リンクロボットでの解明-, 第20回ロボティクスシンポジア予稿集, pp.571--578, 2015.
[7] 朝岡 忠, 水内 郁夫. ロボットリンク間干渉力の活用による対象部位の瞬間的な高エネルギ状態遷移の実機実験, 第32回日本ロボット学会学術講演会講演論文集, RSJ2014AC1B3-07, 2014.
[8] 朝岡 忠, 水内 郁夫. 運動指令とロボットリンク間におけるエネルギ伝達との関係の状態行動価値関数に基づく解析, 日本機械学会ロボティクス・メカトロニクス講演会2014講演論文集, 1P2-Q05, 2014.
[9] 朝岡 忠, 水内 郁夫. 運動連鎖の活用による効率の良いエネルギ伝達を目的とした ロボット運動パターン生成, 第19回ロボティクスシンポジア予稿集, pp.497--503, 2014.
[10] 本堂 貴敏, 水内 郁夫. 1自由度モータ-ばね直列連成系の解析と速度拡大効果に着目した最適設計理論, 日本ロボット学会誌, Vol.29, No.8, pp.675--682, 2011. (DOI: 10.7210/jrsj.29.675)
[11] 本堂 貴敏, 水内 郁夫. モータ-ばね直列連成系の解析と瞬発力利用動作の実現, 日本機械学会ロボティクス・メカトロニクス講演会'10講演論文集, 2A2-C15, 2010.
[12] 本堂 貴敏, 水内 郁夫. 2自由度モータ - ばね直列連成系の解析と瞬発力利用動作の実現, 第28回日本ロボット学会学術講演会講演論文集, RSJ2010AC1P2-7, 2010.
[13] 本堂 貴敏, 水内 郁夫. 可動範囲制約を直接考慮した1自由度モータ - ばね直列連成系の最適パラメータ決定手法, 第28回日本ロボット学会学術講演会講演論文集, RSJ2010AC1P2-6, 2010.
[14] Takatoshi Hondo and Ikuo Mizuuchi. Kinetic Energy Maximization on Elastic Joint Robots Based on Feedback Excitation Control and Excitation Limit Hypersurface, Journal of Robotics and Mechatronics, Vol.25, No.2, pp.347--354, 2013.
[15] Takatoshi Hondo, Ikuo Mizuuchi. Design and Modal Analysis of Feedback Excitation Control System for Vertical Series Elastic Manipulator, in Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.2888--2893, Tokyo, 2013. (DOI: 10.1109/IROS.2013.6696765)
[16] 本堂 貴敏, 水内 郁夫. 重力・弾性ポテンシャルエネルギを考慮したフィードバック励振制御系の解析, 日本機械学会ロボティクス・メカトロニクス講演会2013講演論文集, 2P1-O07, 2013.
[17] 本堂 貴敏, 水内 郁夫. フィードバック励振制御と等エネルギ面解析に基づく弾性関節を活用した高運動エネルギ実現法, 日本機械学会ロボティクス・メカトロニクス講演会'12講演論文集, 2A1-G10, 2012.
Contact
University Research Administration Center(URAC),
Tokyo University of Agriculture andTechnology
urac[at]ml.tuat.ac.jp
(Please replace [at] with @.)