Smart Mobility Research Center
Research members: Dr. Hiroshi Mouri, Dr. Takayoshi Kamada, Pongsathorn Raksincharoensak PhD., Dr. Masao Nagai, Dr. Katsumi Moro
Research fields: Social/Safety system science, Principles of Informatics (2), Mechanical engineering
Departments: Institute of engineering
Keywords: Drive recoder,Database,Incident,Mobility,Driver assistance
Web site:
Summary
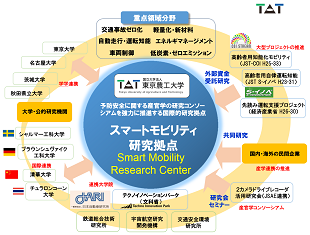
Zero accidents and Zero emissions are the main focuses of the Smart Mobility Research Center at TUAT. Studies on active safety and advanced driver assistance systems as well as environment-friendly vehicles and alternative power systems for enhancing energy efficiency are also important issues for the future smart mobility.
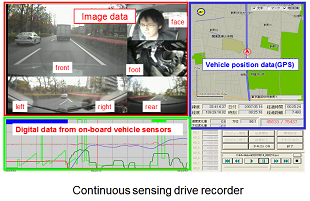
As one of our activities, TUAT has extensive experience and a great number of research achievements on Near-miss incident data in-depth analyses based on image-captured drive recorder data as well as vehicle control by using Car-Robotics technology. Annually, we got a number of national grant-in-aid, joint-research funds from many domestic and international automotive industries and suppliers. These achievements exhibit the research potential of TUAT in the field of advanced safety vehicle research.
By launching the Smart Mobility Research Center, TUAT will become an initiative for scientific researches on advanced vehicle safety and low emission vehicles throughout a consortium of partners from academia, government and the industry. This will accelerate extensive researches on active safety technology for reducing traffic fatalities as well as enhancing intelligence of mobility.
Reference articles and patents
[1]ポンサトーン・ラクシンチャラーンサク, 酒井裕一, 清水郁子, 永井正夫, ダーク・ウルブリヒト, ロルフ・アドマット, 車載カメラの横断歩道認識に基づく歩行者衝突防止システムの開発, 自動車技術会論文集, 45(2):375-380, 2014.
[2]Pongsathorn Raksincharoensak, Yuta Akamatsu, Katsumi Moro and Masao Nagai, Predictive Braking Assistance System for Intersection Safety Based on Risk Potential, Proceedings of 7th IFAC Symposium on Advances in Automotive Control 2013, 2013.
[3]ポンサトーン・ラクシンチャラーンサク, 毛利宏, 永井正夫, 四輪操舵車両の車線自動追従制御の検討, (横運動とヨー運動の理論的考察), 日本機械学会論文集, Vol.69, No.681, 1254-1259, 5, 2003.
[4]Hidehisa Yoshida, Hiroshi Mouri, Shigeki Sato, Masao Nagai, A Study on Lane Departure delay System, JSAE, Review of Automotive Engineering, Vol.27, No.2, 273-278, 2006.
[5]Pongsathorn Raksincharoensak, Hiroshi Mouri, Masao Nagai, Evaluation of Four-Wheel-Steering System from the Viewpoint of Lane-Keeping Control, International Journal of Automotive Engineering Vol.5 No.2 69-76, 2004.
[6]Takayoshi Kamada, Kazuyuki Hiraizumi and Masao Nagai, Active Vibration Suppression of Lightweight Railway Vehicle Body by Combined Use of Piezoelectric Actuators and Linear Actuators, Vehicle System Dynamics, International Journal of Vehicle Mechanics and Mobility, 2010.
[7]佐藤桂, 竹中邦夫, 永井正夫 “模擬市街路における無信号交差点通過行動のデータ解析 -熟練ドライバと高齢ドライバの比較-”, 自動車技術会論文集, Vol.45, No.2, pp. 425-430, 2014.
Contact
University Research Administration Center(URAC),
Tokyo University of Agriculture andTechnology
urac[at]ml.tuat.ac.jp
(Please replace [at] with @.)